
BME280 是一顆結合溫度、濕度、氣壓於一的數位感測器,可以透過SPI及I2C存取。並且 BME280 的體積很小,包裝為LGA,性能與表現上算是相當不錯的一顆感測器。名字上與 BMP280 很相近,BMP280僅有氣壓感測,但兩者的暫存器是可以相容的。
該實例以STM32L031F6Px進行開發,使用I2C通訊協定,配合STM32CubeMX及Keil 5,使用HAL函式庫。關於感測器更詳細的內容及資料可以參考資料手冊:BOSCH BME280 Datasheet。

上述有提及 BME280 可以使用I2C及SPI進行通訊,在Datasheet第38頁有提及Pinout Description。若要使用I2C的通訊協定,Chip Select接至VDDIO,而SDO可以進行Address的選取。
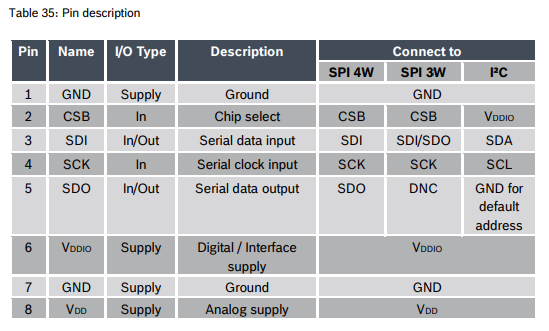
關於SDO的詳細描述在P.32、P.33有詳細提及。若SDO接GND,則Address為0x76;若SDO接VDDIO,則Address為0x77。且該腳不可為Floating,會導致I2C無法判定Address為何。

市面上有許多現成的 BME280 模組可以供購買使用,不需調整硬體的配置就可以直接使用。受疫情影響,全新的 BME280 晶片在Mouser、DigiKey已經銷售完畢,但模組的部分仍有不少國內外平台販售中,若有需求建議可以直接購買模組,價格也會較漲價後的純IC便宜些。
而BOSCH也相當慷慨,在Github有釋出官方的Driver API for BME280 ,在使用上就可以很快速的上手,不須詳細的閱讀通訊的內容,僅需針對需求的使用情境進行設定的調整即可。
送上Github Link:https://github.com/BoschSensortec/BME280_driver
BME280 的Datasheet中甚至提供了幾個建議的情境設定,包含消耗電流與反應時間及相關參數都附上,算是相當大方也完整的資料手冊。

在官方釋出的Driver中告知有3個函數需要我們自行定義(I2C為例)。
void user_delay_ms(uint32_t period); int8_t user_i2c_read(uint8_t reg_addr, uint8_t *reg_data, uint32_t len); int8_t user_i2c_write(uint8_t reg_addr, uint8_t *reg_data, uint32_t len);
且存取後皆使用printf進行打印,這部分在STM32CubeMX Lesson9有提及如何將HAL庫中的UART傳送功能使用printf完成。
除了需要include <stdio.h>外,也需要定義printf為UART的傳送(以UART2為例)。
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif /* __GNUC__ */
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart2, (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}先將github的source code下載下來後,將 bme280.c 放入專案目錄中的Core/Src;將 bme280.h、 bme280_defs.h放入專案目錄中的Core/Inc。
使用STM32CubeMX建立完專案後,在Keil IDE點擊Application/User/Core兩下,將 bme280.c新增至專案。

在main.c最前方Includes的地方需要include剛剛所加入的檔案,以及重定義printf所需的stdio.h檔。

前方有提及官方釋出的Driver需要我們自定義三個Function,可以在main.c中直接定義,或是在 bme280.c 中也可以,但需要include HAL的函式庫。
● user_i2c_read
int8_t user_i2c_read(uint8_t id, uint8_t reg_addr, uint8_t *data, uint16_t len)
{
if(HAL_I2C_Master_Transmit(&hi2c1, (id << 1), ®_addr, 1, 10) != HAL_OK) return -1;
if(HAL_I2C_Master_Receive(&hi2c1, (id << 1) | 0x01, data, len, 10) != HAL_OK) return -1;
return 0;
}● user_delay_ms
void user_delay_ms(uint32_t period)
{
HAL_Delay(period);
}● user_i2c_write
int8_t user_i2c_write(uint8_t dev_addr, uint8_t reg_addr, uint8_t *reg_data, uint8_t cnt)
{
HAL_StatusTypeDef status = HAL_OK;
status = HAL_I2C_Mem_Write(&hi2c1, dev_addr<<1, reg_addr, I2C_MEMADD_SIZE_8BIT, reg_data, cnt, 0xffff);
if (status == HAL_OK)
return(0);
else
return(-1);
}完成了以上三個Function的定義後, bme280.c 則可以透過這三個Function進行I2C的通訊與存取,未來若使用他家的MCU,也是重新定義此部分即可。
接著在main的USER CODE BEGIN2下方宣告 bme280 的I2C設定,將讀寫的指標指向我們前方所定義的三個Function,並初始化I2C的設定,在官方的github中也有說明。

struct bme280_dev dev;
int8_t rslt=BME280_OK;
dev.dev_id = BME280_I2C_ADDR_PRIM; //0x76
dev.intf = BME280_I2C_INTF;
dev.read = user_i2c_read;
dev.write = user_i2c_write;
dev.delay_ms = user_delay_ms;
rslt = bme280_init(&dev);接著就是進行 bme280 本身的設定,我們所使用的模式為Forced Mode,當存取完資料就進入睡眠模式,待再次存取喚醒 bme280 。因此官方有建議該模式的相關設定如下
struct bme280_data comp_data;
dev.settings.osr_h = BME280_OVERSAMPLING_1X;
dev.settings.osr_p = BME280_OVERSAMPLING_4X;
dev.settings.osr_t = BME280_OVERSAMPLING_2X;
dev.settings.filter = BME280_FILTER_COEFF_8;
rslt = bme280_set_sensor_settings(BME280_OSR_PRESS_SEL | BME280_OSR_TEMP_SEL | BME280_OSR_HUM_SEL | BME280_FILTER_SEL, &dev);緊接著完成了I2C與 BME280 的設定後,就是到while迴圈進行Polling的存取,當rslt的返回值為 BME280_OK,則將溫濕度與氣壓透過UART print至電腦。
while (1)
{
rslt = bme280_set_sensor_mode(BME280_FORCED_MODE, &dev);
dev.delay_ms(40);
rslt = bme280_get_sensor_data(BME280_ALL, &comp_data, &dev);
if(rslt == BME280_OK)
{
float temperature = comp_data.temperature / 1.0;
float humidity = comp_data.humidity / 1.0;
float pressure = comp_data.pressure / 1000.0;
printf("%03.2f,%03.2f,%03.3f\r\n",temperature,humidity,pressure);
}
HAL_Delay(100);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}透過RealTerm則可以看到BME280所輸出的數值,分別為溫度、濕度、氣壓。

同時也可推薦一個不錯的軟體SerialPlot,可以直接將Com Port收到的數值進行切割與波型顯示,也可以將數值紀錄為CSV檔,或將波型輸出為SVG向量圖檔。
下圖波型上升與下降為手指接觸,測試溫溼度的曲線變化。

Great content! Keep up the good work!
Many thanks for your support!
I will keep going.
Hi there vedry nice blog!! Maan .. Excellent ..
Amazing .. I’ll bookmark yolur website and take the feeds additionally?
I’m satisfied to fund a lot of helpful info right here within the submit, we’d like develop extra techniques on this regard,
thanks for sharing. . . . . .
Thank u so much!
I’m sorry that only Chinese content is available at the moment.
But I will continue to create in the future haha!